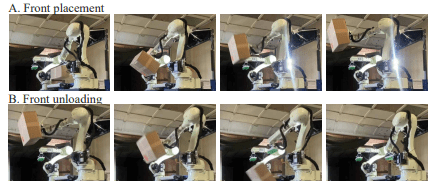

Grasp Failure Constraints for Fast and Reliable Pick-and-Place Using Multi-Suction-Cup Grippers
Jee-Eun Lee, Andrew Bylard; Robert Sun; Luis Sentis
submitted 2024
Grasp failure constraints for time-optimal trajectory planning
On the Performance of Jerk-Constrained Time-Optimal Trajectory Planning for Industrial Manipulators
Jee-Eun Lee, Andrew Bylard; Robert Sun; Luis Sentis
2024 IEEE International Conference on Robotics and Automation (ICRA)
Jerk-constrained time-optimal trajectory planning (speed planning)
Jee-eun Lee; Jaemin Lee; Tirthankar Bandyopadhyay; Luis Sentis
2023 IEEE International Conference on Robotics and Automation (ICRA)
Symmetry-aware learning representation
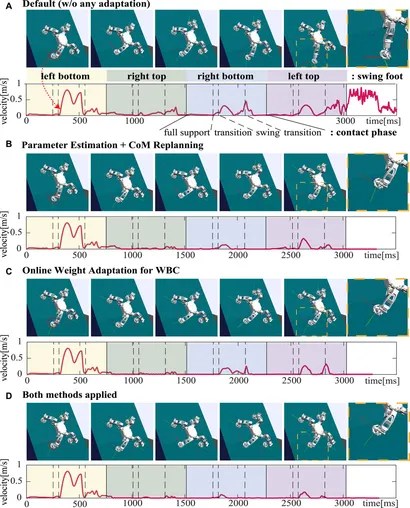
Adaptive robot climbing with magnetic feet in unknown slippery structure
Jee-Eun Lee, Tirthankar Bandyopadhyay, Luis Sentis
Frontiers in Robotics and AI, 2022
A whole-body control framework integrating adaptive CoM trajectory optimization, parameter estimation, and dynamic GRF distribution for reliable climbing.
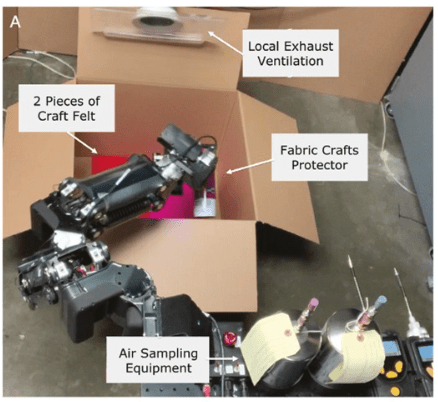
Estimating exposures from spray products using robotic simulations
Mi K Shin, Hua Qian, Jee-Eun Lee, Luis Sentis, Silvia I Maberti
Annals of Work Exposures and Health 2023
Human-Mimic Motion Generation for Robotic Exposure Assessment in Industry.
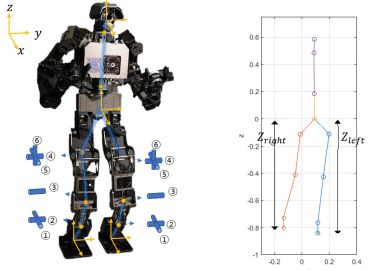
Kinematic Parameter Calibration for Humanoid Robot Using Relative Pose Measurement in Walking Motion
Jee-eun Lee; Jaeheung Park
2019 16th International Conference on Ubiquitous Robots (UR)
Humanoid calibration using camera while walking.
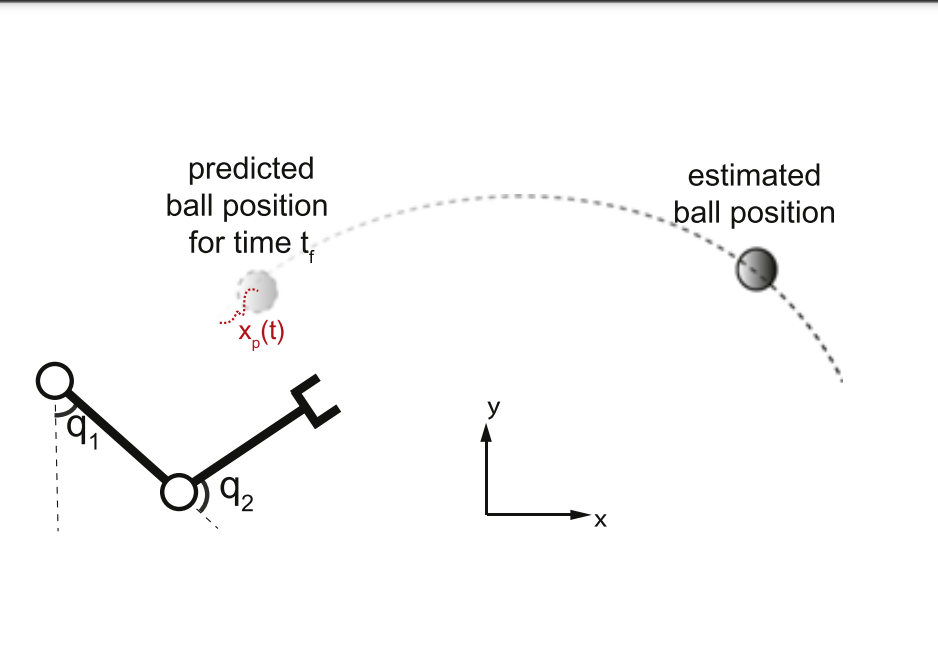
A minimum attention control law for ball catching
Cheongjae Jang, Jee-eun Lee, Sohee Lee and F C Park
2015 Bioinspiration & Biomimetics
Minimum Attention Control for Generating Human-Like Arm Motion.
