My paper titled “Adaptive robot climbing with magnetic feet in unknown slippery structures” published in Frontiers in Robotics and AI, was a collaborative effort with Tirthankar Bandyopadhyay from Australia’s CSIRO Data61 group
Motivation
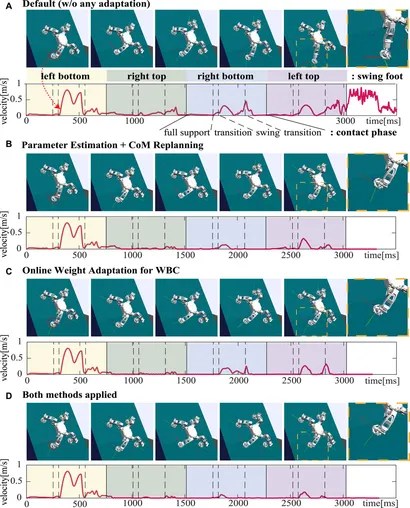
As shown in the video below, the research highlights the movement of the Center of Mass (CoM) in climbing, which plays a crucial role in preventing falls and maintaining stability.
Method
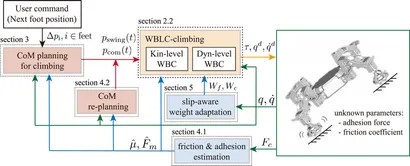
This study introduces a comprehensive framework for planning and control of climbing robots, designed to enhance robustness against slippage in unknown environments. The framework includes 1) a center of mass (CoM) trajectory optimization under the estimated contact condition, 2) Kalman filter–like approach for uncertain environment parameter estimation and subsequent CoM trajectory re-planing, and 3) an online weight adaptation approach for whole-body control (WBC) framework that can adjust the ground reaction force (GRF) distribution in real time.
Results
check out our paper and code!
